PID控制(一)参数调节规律(pid参数调节口诀)
2023-07-24 05:48:44 阅读:
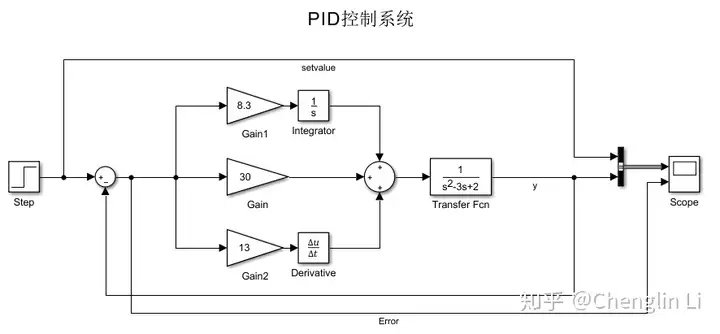
1 搭建Simulink框图
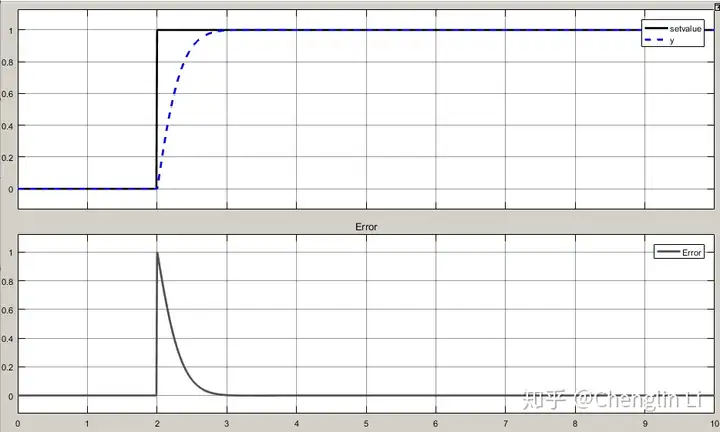
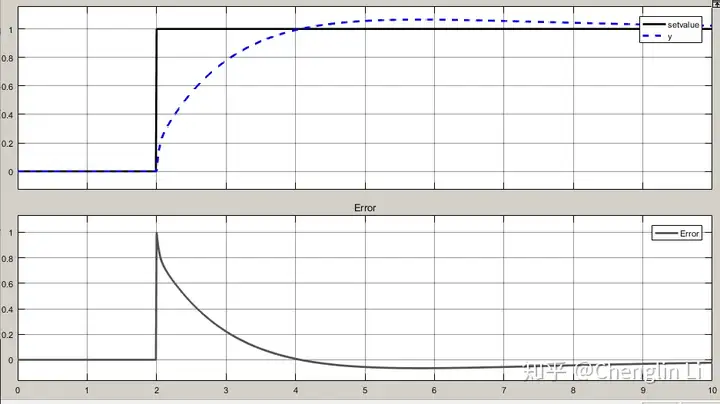
2 输出结果
3 参数功能[1]
将需要控制的物理量带到目标附近。可以“预见”这个物理量的变化趋势。可以消除因为散热、阻力等各种因素造成的静态误差
控制量: u=KP(y−v)+KI∫(y−v)dt+KDddt(y−v)u=K_P(y-v)+K_I\int{(y-v)}dt+K_D\frac{d}{dt}(y-v)(1)比例(proportional)P
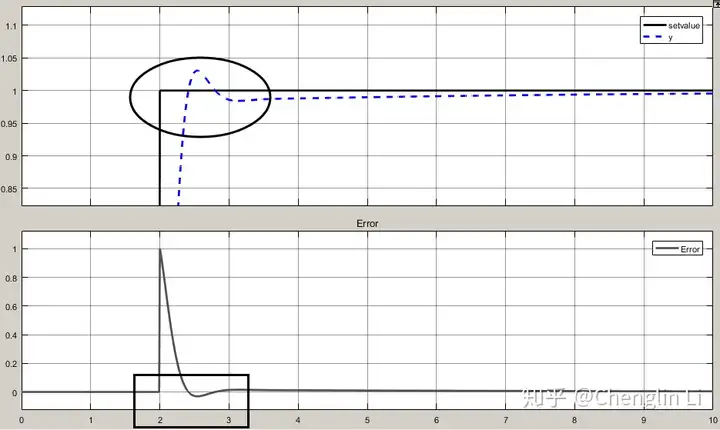
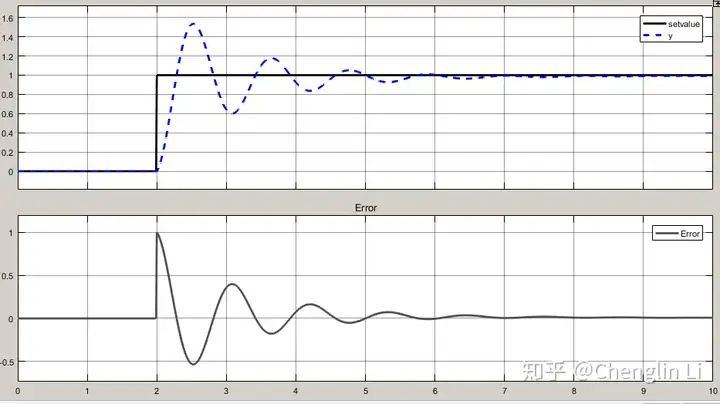
就让偏差(目标减去当前)与调节装置的“调节力度”,建立一个一次函数的关系,就可以实现最基本的“比例”控制了。 KPK_P KPK_P KPK_P 越大,调节作用越激进,响应的速度越快,进而产生超调量。KPK_P 调小会让调节作用更保守,响应速度变缓慢。若 KP=50K_P=50,此时响应如下图3。
(2)微分(derivative)D
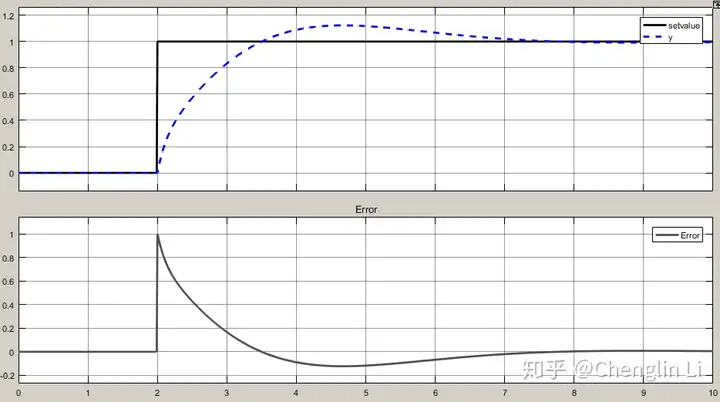
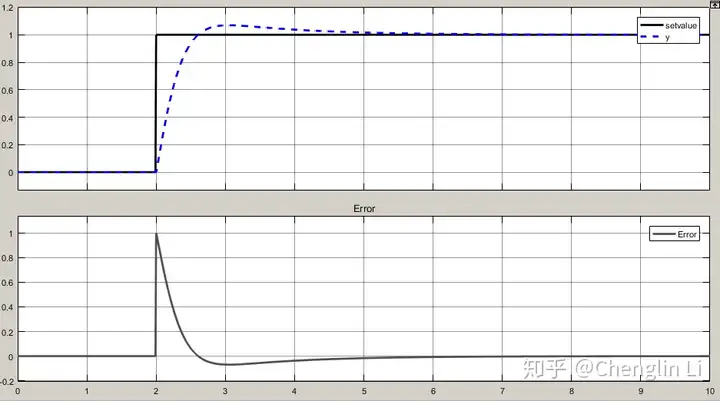
只有比例P的作用,那么系统会在目标附近震荡抖动。微分D的作用在于使被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用。KDK_D 参数越大,对偏差变化的阻尼抑制作用越强,即误差趋于0的速度变得缓慢; KDK_D 参数越小,对偏差变化的阻尼抑制作用越弱,进而产生震荡。若 KD=30K_D=30,此时响应如下图5。
,此时响应如下图6。
(3)积分(integral)I
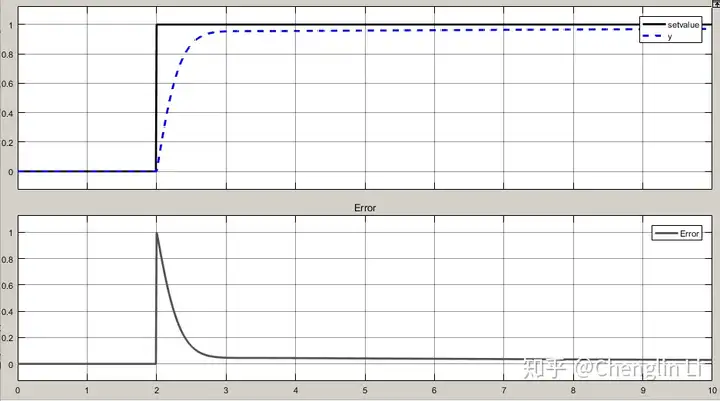
只有比例和微分,被控制的物理量可能会停留在目标值附近,不再变动。积分I的作用是不断地对偏差进行积分(累加),并反应在调节力度上。减小静态情况下的误差,让受控物理量尽可能接近目标值。KIK_I 的值越大,积分时乘的系数就越大,积分效果越明显,但是会产生超调量。在刚开始时,积分量积得太大,会难以控制。KIK_I 的值越小,则物理量接近目标值的速度变得缓慢。若 KI=20K_I=20,此时响应如下图7。
,此时响应如下图8。
参考
^https://blog.csdn.net/qq_41673920/article/details/84860697以上就是关于《PID控制(一)参数调节规律(pid参数调节口诀)》的全部内容,本文网址:https://www.7ca.cn/tg/40544.shtml,如对您有帮助可以分享给好友,谢谢。
声明




