详解ACC自适应巡航控制系统(上)
ACC指的是自适应巡航控制系统(Adaptive Cruise Control),是一套提升驾驶体验的智能化自动控制系统。区别于定速巡航仅能以给定的速度在路况较好的情况下使用,ACC系统不仅能够以给定的速度巡航,也可以根据前车的运行状态,智能调节当前车辆的运行速度,保持与前车的动态安全距离,提高驾驶舒适性,降低驾驶员的驾驶压力。
自动驾驶的最终目标,是将人类驾驶员从繁重的车辆动态驾驶任务中解放出来。虽然这一目标距离我们当下的生活还较为遥远,但现阶段可实现的驾驶模式已然大有不同:无需踩踏油门即可前进,感应到与前车距离过近时还能自动减速……这一切都要归功于ACC自适应巡航控制系统的出现。本篇文章将深入剖析ACC系统,进一步了解它的“自适应”能力。
ACC基本功能介绍
ACC(自适应巡航控制)是一种舒适性驾驶辅助系统,旨在帮助驾驶员在公路上与前方车辆保持安全距离。当前市场主流的ACC功能支持的速度范围是0~150kph,根据传感器和车辆性能,也可以支持更高的速度,比如200kph,以满足欧洲客户的需求。
实际上,ACC的发展也经历了多个阶段,从最初的30~120kph到0~150kph,再至引入排队功能的Stop&Go,而当前的ACC又可以被称作FSRA(Full Speed Range ACC)。ACC的出现对于CC而言是一种质的飞跃,极大地减轻了驾驶员的负担,在相对复杂的交通环境下,让驾驶员不必进行频繁的功能取消和功能激活动作。
ACC的基本功能包括:ACC仅控制车辆的纵向运动,自动执行包括以设定速度行驶、跟随前车行驶、以及跟随前方车辆停止与起步控制等动态驾驶任务。
当前方没有车辆时,ACC系统控制自车以驾驶员设定的速度行驶;当前方有车辆并且自车车速或设定速度高于前车时,ACC系统将速度降低至与前车车速一致并按照驾驶员设定的时间间隔跟随该车辆行驶,同时与该车辆保持一定的距离(依据此时间形成的距离,也称之为时间距);当前车加速或不再存在于本车前进车道时,本车将加速至设定车速。
ACC车辆跟随前车行驶时,如果前车减速停车,ACC车辆将跟随前车减速直至停车。停车以后,如果在一段时间内(一般3~10s),检测到前车驶离,ACC车辆则自动跟随前车驶离。如果本车保持停车时间较长,或者停车以后,有新的目标(行人或物体)穿过ACC车辆和前车之间,ACC车辆应进入保持状态,然后在驾驶员确认后驶离(点击恢复按钮或轻踩油门踏板)。
对于ACC系统而言,对于前车态势的判断主要依赖于相对车速,相对距离与方向。为了实现上述功能,以下需要被满足:
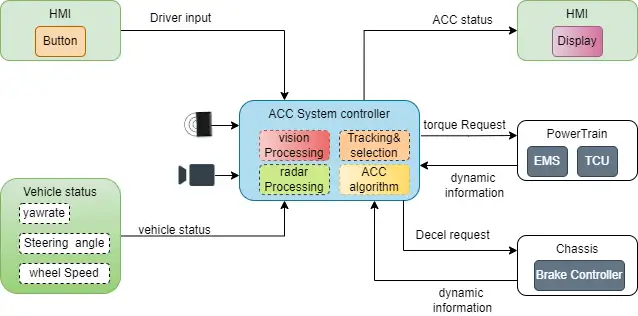
1.需要引入雷达和摄像头,或两者选其一来实现对车辆前方行驶区域的感知,测量自车前方车辆的运动属性(方位、横向速度、纵向速度、运动状态等),筛选出对自车行进方向上合理的跟随目标(合法的机动车道路参与者:汽车,摩托车等)。
2.需要车辆的制动系统(ESC)和驱动系统(Powertrain)响应ACC系统发出的控制指令。
3.需要整车HMI系统获取驾驶员的操作意图(ACC系统开启、ACC系统关闭、ACC系统恢复、加速/减速设定、跟车距离设定等)。
4.需要整车HMI系统显示ACC系统的状态信息及目标跟随信息等。
5.需要引入ACC车辆的运动状态信息(偏航率,车速,方向盘转角等)用来实现ACC系统对自车运动状态及运动趋势的评估。
ACC系统框图如下图所示:
02、ACC的控制策略
作为面向终端用户交付的驾驶辅助功能,ACC首先需要处理从功能启动到任务完成关闭系统这一过程中的状态切换问题,这一过程关联到的状态众多,ACC控制功能通常会按照事先定义的跳转条件在各状态间切换。
例如:在启动条件下检测控制器是否有影响功能开启的软硬件故障,如果有故障,则跳转至off,并发出相关的提示信息在仪表上显示,提示驾驶员功能不能开启;不存在影响ACC功能开启的故障时,跳转至standby 等待;功能开启按钮被按下后,则跳转至功能控制模块执行相关操作;当越控(override)或禁止(inhibit)条件满足时,功能及时退出。
在FSRA相关的ISO22178规范中,对于ACC运动状态,其提出了通用性的状态机:
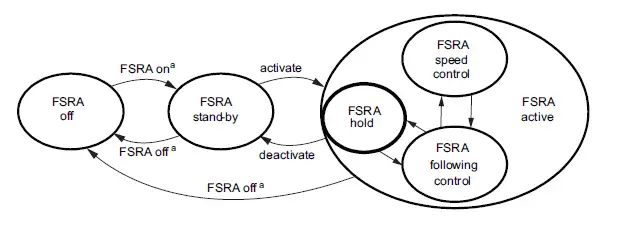
在实际运用中,典型控制逻辑如下图所示:

总体而言,ACC控制部分分为以下工作任务:
1. ACC的目标确认与挑选
2. ACC与目标的控制逻辑
3. 对于越控,停车的处理
ACC目标确认与挑选
目前的ACC系统,大多采用前向毫米波雷达与前视摄像头感知融合的方案。摄像头在目标分类、静止目标识别、目标所在车道识别方面有先天的技术优势,但是面对恶劣天气以及探测距离、测距测速精度方面存在不足。毫米波雷达在远距离目标探测、测距测速精度、全天候工作等方面有技术优势,与摄像头形成很好的互补,尤其是ACC高速跟车场景,毫米波雷达发挥至关重要的作用。
对于ACC而言,最重要的就是首先确认本车前方三条车道内的潜在目标。根据细节策略不同,有的厂商会确认四个目标,即本车道前方2目标,左右车道各一个目标;有的厂商会确认6个目标——每个车道各2个目标;有的厂商还会将动静态目标分开确认。但无论何种方式,基本的原则是一致的,即需要确认少量的、分布在前方3条车道内的潜在目标。
需要指出的是,对ACC而言,车道线不是必须的。实际上,世界上第一个ACC系统是单雷达系统。环境感知处理单元在没有摄像头辅助进行车道线识别的情况下,需要通过雷达跟踪前方车辆的运行轨迹,综合上雷达检测到的道路边沿或栏杆的轨迹,对前方车道进行推理。因此,可以预见的是,对于单雷达的ACC系统而言,本车道前方的动态目标是相对敏感和准确的。
当前方若干目标被识别以后,需要进一步确认,ACC的主要跟随目标、旁边车道准备cut in的目标、本车道内准备切出的目标、旁边车道在本车变道的情况下转换为主要跟随目标的目标分别是哪一个。这些问题一般通过一个较复杂的区域切块的“漏斗”来对潜在目标进行过滤识别:
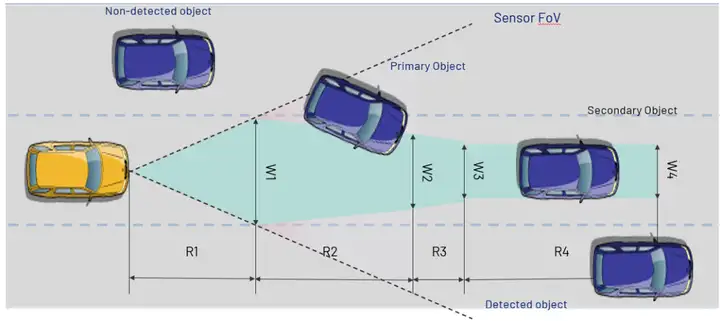
如上图,通过设定不同的区块,并且通过判断不同的目标是否进入不同的区块以决定对不同目标的潜在策略。除了区块大小外,目标本身的运动属性也是判断是否需要被采取某种策略的重要依据,同时,也都是ACC调参调优的重要参数。
ACC与目标的控制逻辑
一旦ACC确定了需要处理的目标后(可以同时处理多个需不同对待的目标备用),一般采用滑模控制(sliding mode)理论来对自车纵向进行控制:

对于本车而言,只存在四种状态:
1.Catch up – 本车的设定车速还没有达到,需要加速追赶。
2.Above catch up – 本车不需要加速也凭借着较大的range rate逼近前车,甚至需要减速以达到稳定状态。
3.Overshoot – 本车离前车太近而且range rate较大,需要减速。
4.Fallback – 本车离前车较近,但并不需要太过干涉,减速度会逐渐使两车分离达到稳定状态。
所有四种状态沿着滑面无缝切换,以保证平稳控制。为了达成较好的控制舒适度,每一种状态需要在不同速度段进行标定以确定其加速度,加速度斜率等限值。
有一些情况是需要同时通过滑模控制获取不同的控制结果并进行仲裁最终控制自车的。例如,当驾驶员打转向灯表现出变道意图时,在ACC目标选择模块需要迅速确定新的潜在主目标的同时,ACC控制本身也需要仲裁当前目标与潜在主目标的控制目标:减少当当前处于catch up阶段而变到新车道后变为overshoot阶段时的加速度落差的不适应感。
另一点值得注意的是,有部分车辆不提供集成好的VLC(Vehicle Longitudinal Control)模块。换言之,ACC纵向控制的加速部分需要以扭矩的形式发送给Powertrain,这时需要对换挡时机/发动机扭矩输出曲线配合才能避免加速顿挫的情况出现。
ACC越控与驻车
一般而言,ACC允许驾驶员进行越控控制,即当驾驶员的油门输入大于虚拟油门开度时,以驾驶员的输入为执行目标。当驾驶员长时间越控时,ACC退出。这也是避免驾驶员长时间越控忘记ACC还处于Active状态。
在一般的Stop&Go的场景中,车辆制动系统保压保持车辆静止,超过一定时间后,电子驻车系统EPB拉起替代车辆制动系统驻车,保证安全。
当前,在高速公路及封闭的城市道路上,搭载ACC功能的整车系统大都能够提供标称的驾驶辅助功能,较好地实现人车协同,缓解长距离驾驶导致的疲劳及应对适应陌生城市道路限速需要的频繁速度控制操作,使得驾驶员可以更为专注地观察路况,选择正确的行驶路径。
以上就是关于《详解ACC自适应巡航控制系统(上)》的全部内容,本文网址:https://www.7ca.cn/baike/51956.shtml,如对您有帮助可以分享给好友,谢谢。