AirTag定位什么原理?简易解析UWB和V-SLAM组合定位技术。(airtag 定位技术)
前段时间,Apple新发布的小玩意儿AirTag连上了几天热搜,超宽频(Ultra Wide Band,UWB)技术也走进了大众的视野先摘抄一段百度百科的说法超宽带(Ultra Wide Band,UWB)技术是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。
UWB技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,尤其适用于室内等密集多径场所的高速无线接入 超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。
因此,超宽带技术可以应用于室内静止或者移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度UWB测距原理AirTag上的定位算法有一部分就利用UWB测距经典的UWB原理为双向时间飞行法(two way - time of fly, TW-TOF),即每个模块从启动开始会生成一条独立的时间戳,接收和发送模块在一次通讯后互相比对通讯内容的时间戳,就可以得到信号从发出到接收在空中运行的时间。
通过小学知识路程速度时间路程=速度×时间 路程 = 速度 \times 时间\\ 我们就可以根据电磁波的传播速度和时间计算出接收和发射的距离了说到这里,一般的科普文章就结束了但是仔细一想,AirTag可是能够提供被寻找物体方向的。
得到距离这个标量容易,可是距离+方向这个矢量是如何得到的呢?

AirTag在Find软件中可以精确提供被寻找物体的距离和方向我们先来看看传统的室内UWB定位怎么做。基站定位法打开淘宝搜索UWB定位,可以看到这样的描述
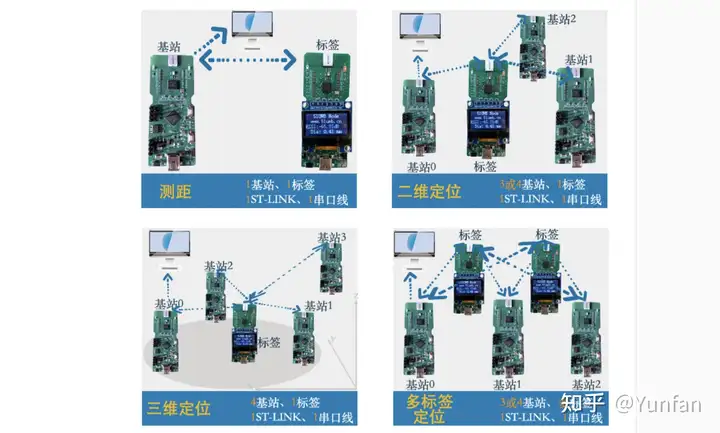
我们可以看到,仅使用测距功能,则一个基站就够了(相当于基站为发射模块,标签为接收模块);二维定位(平面定位)则需要三个基站,而三维定位则需要至少四个基站这是为什么呢?我们首先来看二维情况假设基站测得标签的距离为 。
ρ\rho ,则如图所示
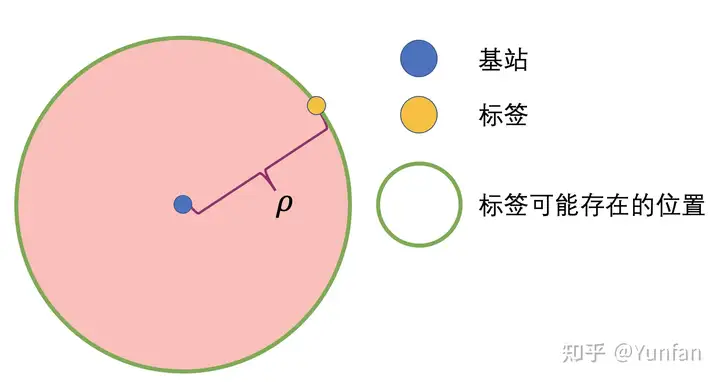
图中蓝色圆形为基站位置,黄色圆形为标签位置,绿色圆圈为标签可能存在的位置当我只有标签和基站之间的距离信息时,我们能知道标签可能存在于以基站为圆心,测量距离为半径的圆环上任意一点(三维情况则拓展成球面)为了确定标签的二维坐标,我们需要更多的基站提供信息。
当我们知道标签和多个基站之间分别的距离时,我们就可以确定标签的位置例如,当我们有两个基站的时候,根据圆形与圆形之间通常有两个交点,这意味着两个基站时,标签的坐标就被约束到只有两种可能如下图所示
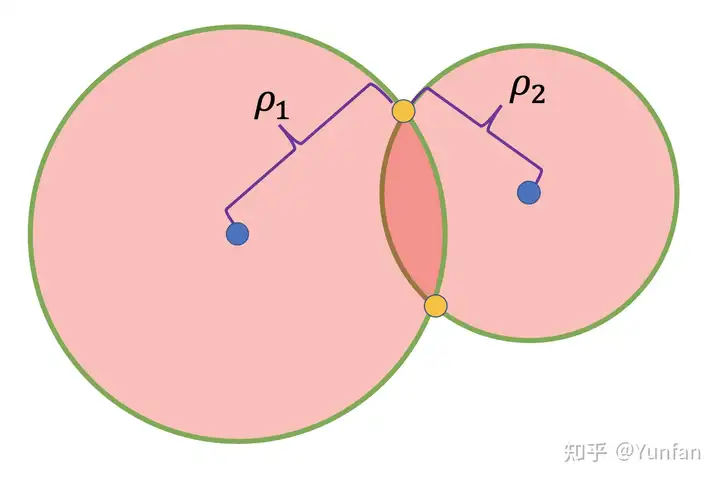
因此对于二维情况,三个基站就可以帮助我们确定一个标签的坐标。
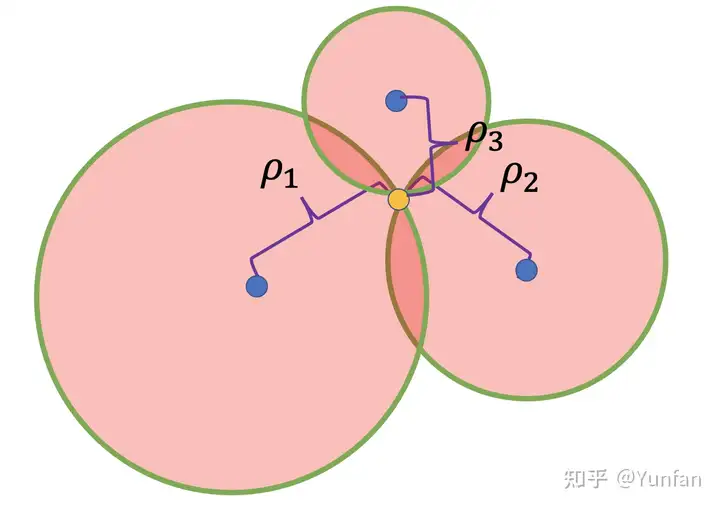
同理,对于三位空间坐标,利用四个基站测量数据,可以得到四个球面的唯一交点,因此可以的到三维空间中的标签坐标这和GPS、北斗等等卫星定位方法也有着异曲同工之妙事实上室内无人机编队中用到的定位方法,通常都是四基站UWB。
iPhone如何实现单基站测方向?看到这里,大多数读者都能明白问题所在了需要完成空间中的定位,是需要多个基站的并且考虑到每个基站的测量误差,基站与基站之间不能相隔太近而对于iPhone和AirTag,这一套系统显然为单基站系统,如何实现测距的同时测量物体方向呢?。

查看了一下官网,只说了UWB技术,并没能知道具体是怎么实现的。我们回头再进行测试,发现find软件并不是一打开就能定位AirTag的。刚刚打开软件,保持不动,find应用中呈现这样的画面
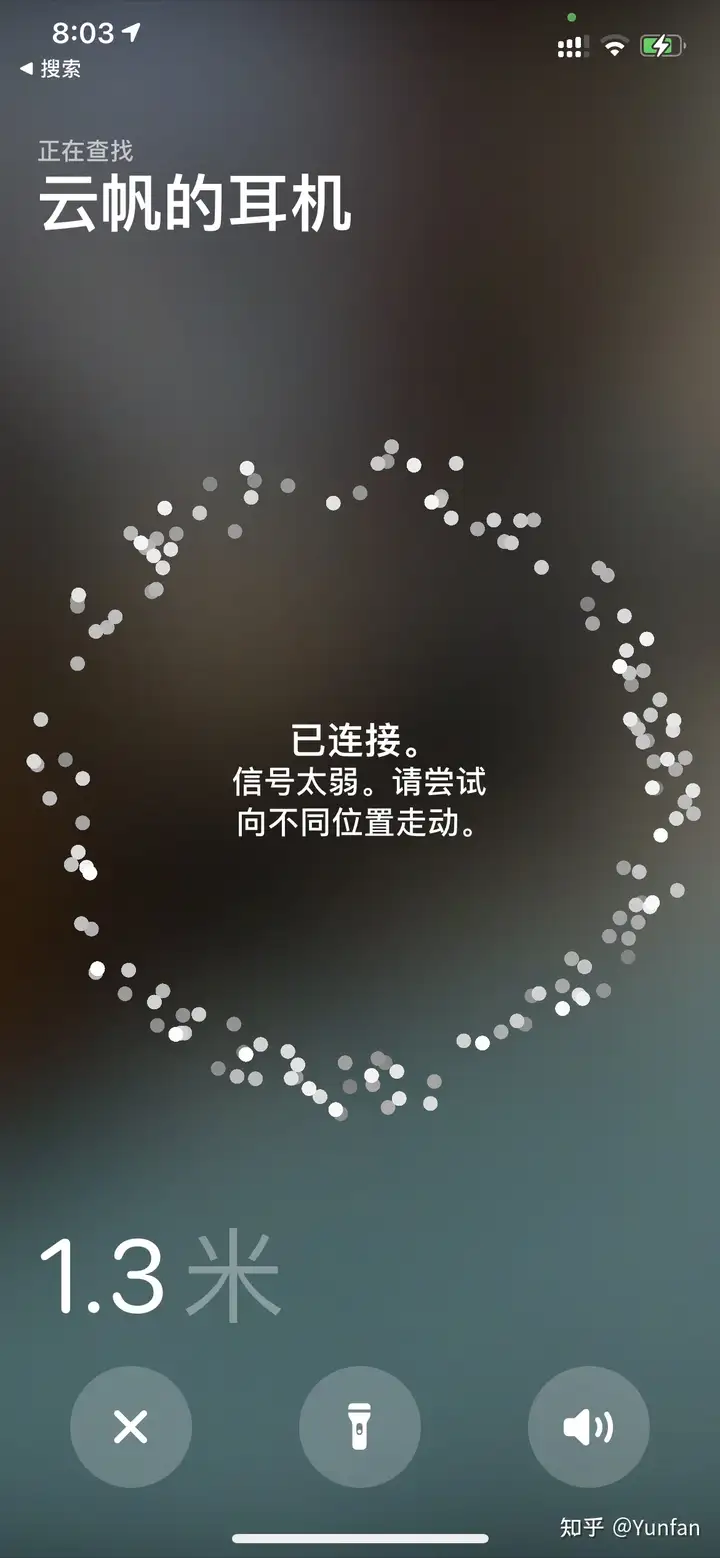
和我们之前提到的一样,AirTag可以快速的给出距离为1.3米,但是并不能立即给出物体的方向,而是需要用户向不同的位置走动。此时我们遮住摄像头,有趣的事情就发生了。
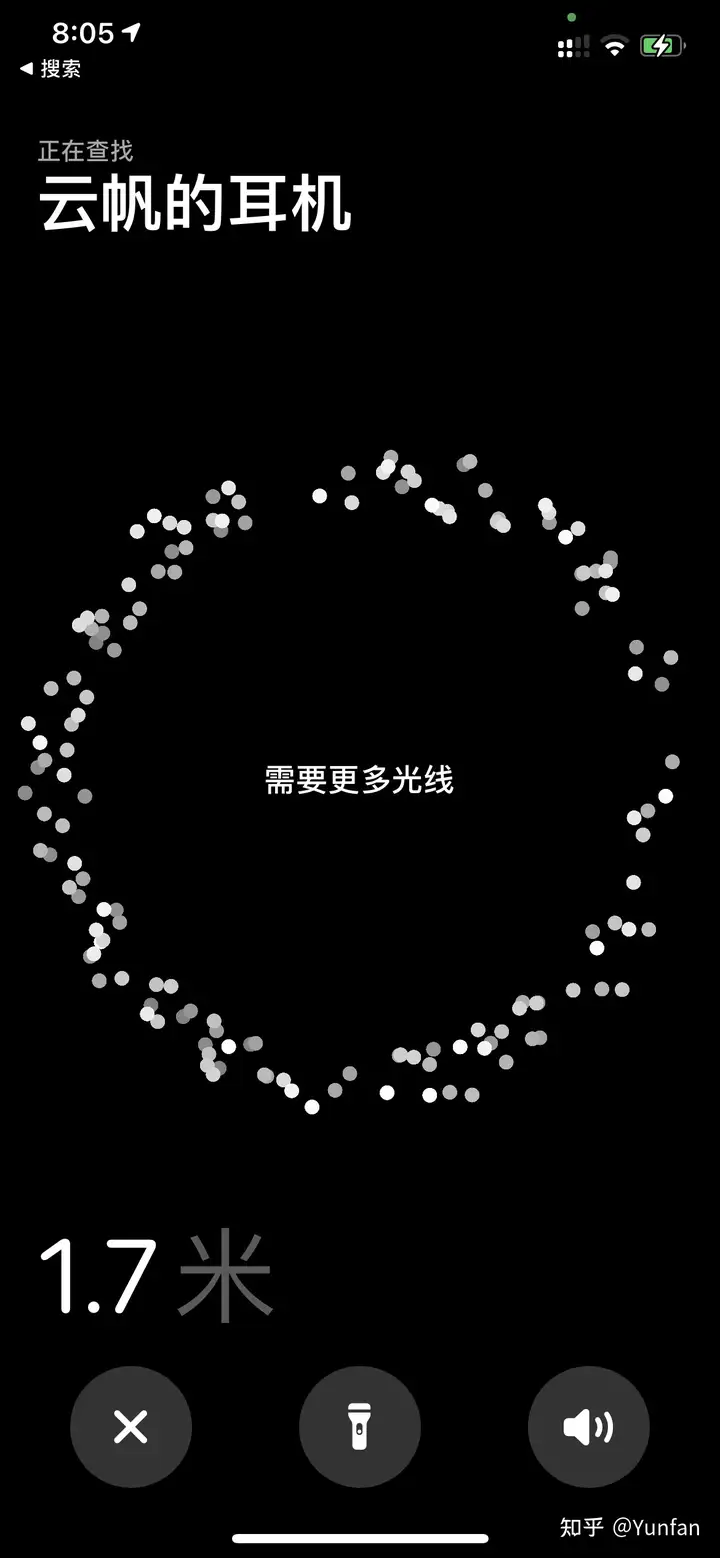
软件提示我们,需要更多光线,为什么UWB寻找还需要光线呢?我们大胆猜测,在寻找过程中,iPhone还利用了摄像头,运行了一个局部视觉里程计(Visual Odometry,VO)算法(可能结合了手机惯性测量元件,实现VIO算法)。
经过测试,在确定了AirTag的位置后,原地转动iPhone(挡住摄像头)也可以进行比较准确方向估计,因此可以确定IMU的测量参与了计算,应该是使用了VIO简单的说,就是iPhone利用摄像头的图像信息能够大概的估计一段时间内手机运动的轨迹。
这个信息非常重要,他使得iPhone这个基站变成了移动基站
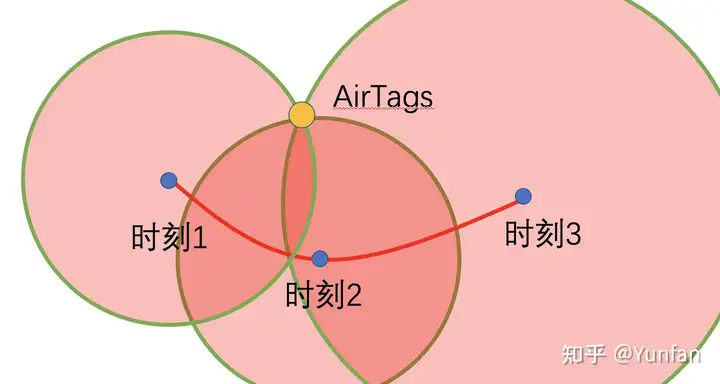
图中红色曲线为VIO估计的iPhone运动轨迹,蓝色圆圈为三个时刻iPhone的位置,黄色源泉为AirTag这样,只需要记录不同时刻测量得到的AirTag距离,并通过局部的VIO估计iPhone(基站)的位置,就可以利用这个移动的基站对AirTag的坐标进行准确估计。
验证猜想有了这个猜想,我们如何验证呢?当然是从VIO以及上述提到的测量思路的特点出发首先,这个测量思想的前提条件是,AirTag的位置不能发生变化我们在测量过程中移动AirTag,应用中出现了这样的提示。
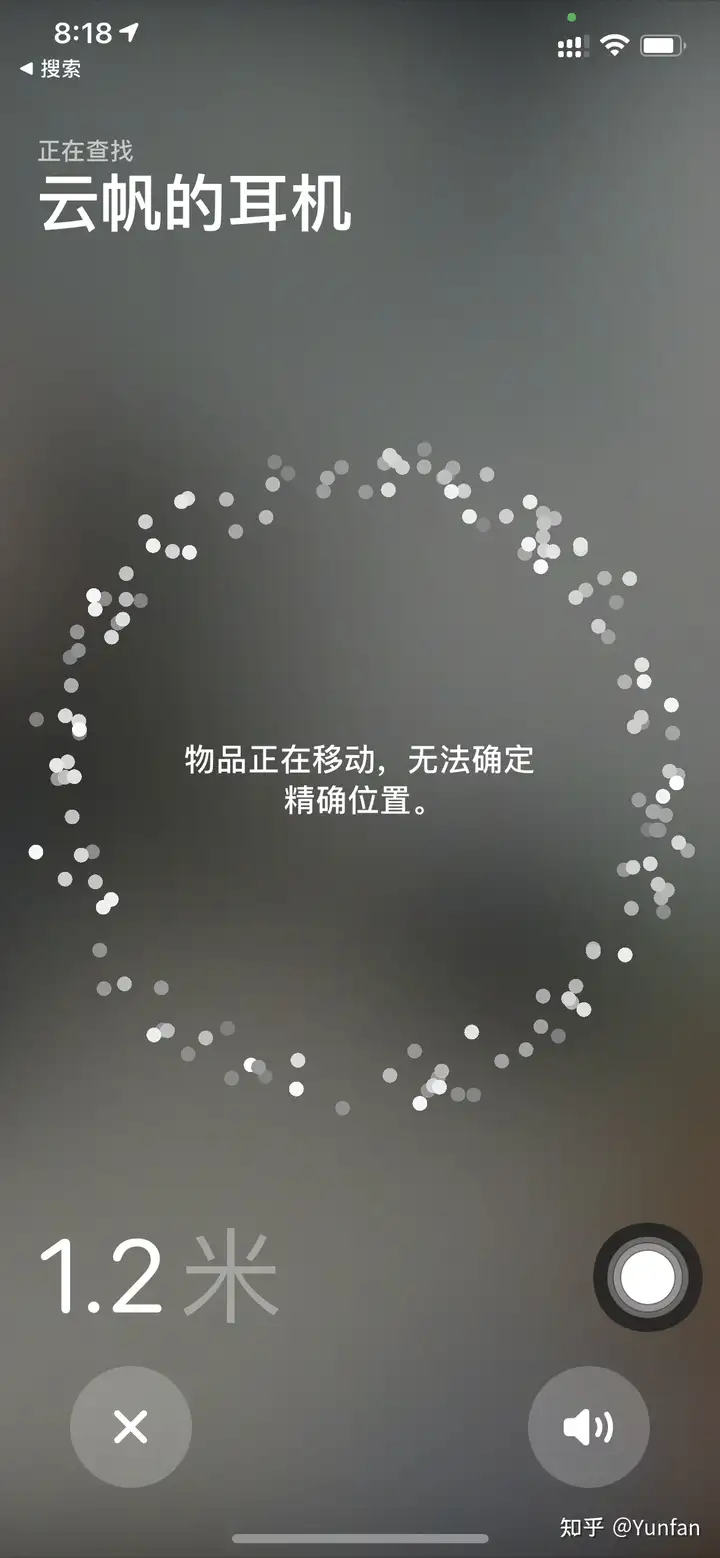
虽然只是一个必要不充分条件,一定程度上还是可以证明我们的猜想第二步,我们考虑VIO的性质整个对AirTag的位置估计算法严重依赖VIO的准确性若VIO对iPhone的运动轨迹估计不准确,则无法得到合理的“移动基站”坐标,更进一步也无法找到目标坐标。
因此我们尝试干扰VIO的估计我们使用一张画布来干扰视觉里程计的轨迹估计,如下图所示。
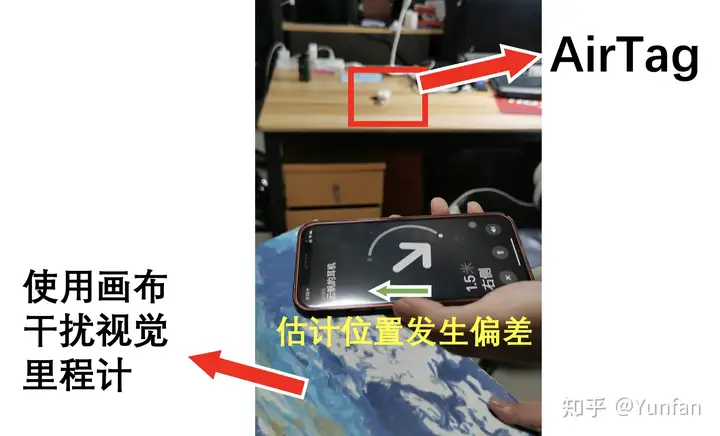
可以看到,受到视觉里程计错误估计的影响,iPhone对AirTag的方向估计也出现了较大偏差一定程度上也可以证明整个AirTag定位算法中应用到了视觉里程计结语最后我们几乎可以肯定,苹果采用的这套方案基于UWB测距和VIO位置估计,最终实现了一个移动基站的思路。
这也是我第一次见到V-SLAM商业化的靠谱的行业应用,实属有趣
以上就是关于《AirTag定位什么原理?简易解析UWB和V-SLAM组合定位技术。(airtag 定位技术)》的全部内容,本文网址:https://www.7ca.cn/baike/6114.shtml,如对您有帮助可以分享给好友,谢谢。