3维旋转矩阵推导与助记-三维的旋转矩阵
旋转矩阵的应用范围比较广,是姿态变换,坐标变换等的基础。本篇先介绍旋转矩阵的推导过程与助记方法。
旋转矩阵的旋转其实包含两种意思,一是在同一个坐标系下,向量的旋转;二是坐标系的旋转,使得同一向量在不同的坐标系下有不同的坐标。
=============1 向量旋转============>
首先讨论二维平面坐标下的旋转,然后引申至三维。
1.1 平面二维旋转
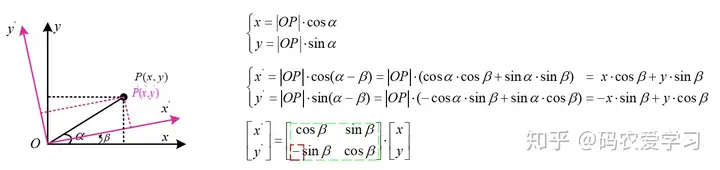
如下图,XY坐标系中,向量OP旋转β角度到了OP的位置:
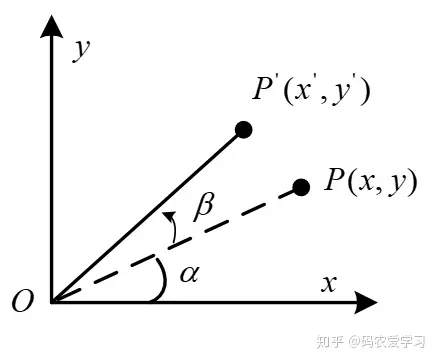
根据三角函数关系,可以列出向量OP与OP的坐标表示形式:
对比上面个两个式子,将第2个式子展开:

用矩阵形式重新表示为:

这就是二维旋转的基本形式,中间的矩阵即二维旋转的旋转矩阵,坐标中的某一向量左乘该矩阵后,即得到这个向量旋转β角后的坐标。
1.2 三维旋转
三维旋转可借助二维旋转来理解,由于三维空间中可以任意轴旋转,为方便分析与使用,只考虑绕X、Y、Z轴的旋转。
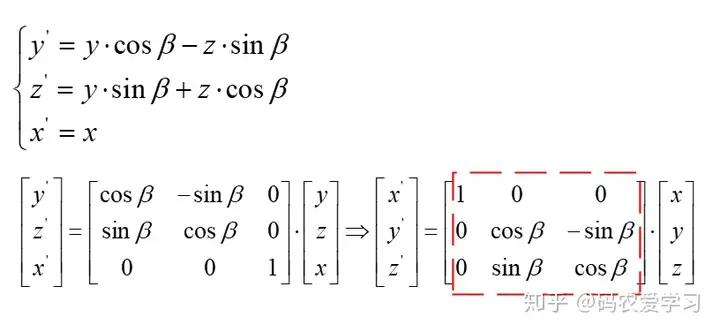
绕Z轴参照上面的图,添加一个Z轴,则上面的二维旋转实际上就是绕Z轴的三维旋转
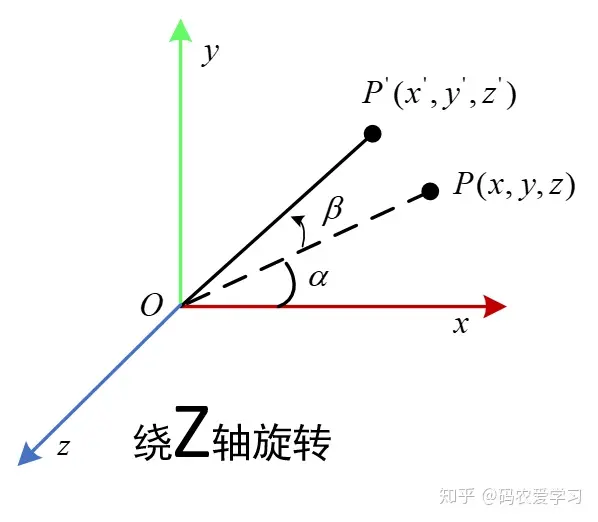
照搬上面的推导公式,并添加Z坐标的变换关系(实际是没有变),然后改写成矩阵形式,红色方框即为绕Z轴的旋转矩阵。

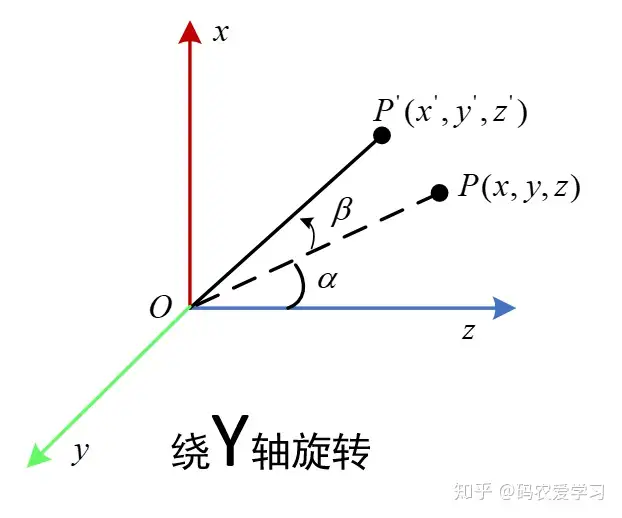
绕Y轴旋转同理,这里直接改变坐标轴的符号表示,注意坐标顺序要符合右手系,我这里用颜色区分了不同的轴。最终的矩阵形式要进一步改写成XYZ的顺序。红色方框即为绕Y轴的旋转矩阵。
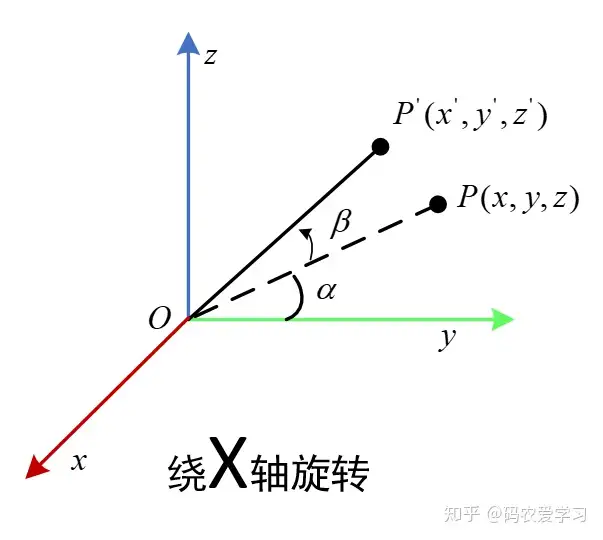
参照绕Y轴的推导,可以得到绕X轴的结果。红色方框即为绕X轴的旋转矩阵。
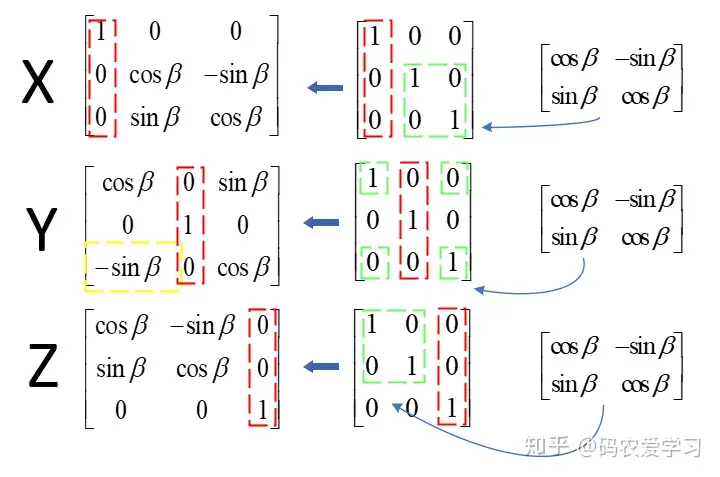
1.3 助记
对于单位矩阵,绕哪个轴旋转,哪一列不用变,然后将二维旋转矩阵替换对应的4个位置,注意,绕Y的旋转矩阵看起来与另外两个不同,它的-sinβ是在左下!
1.4 注意事项
反向旋转如果是反向旋转一个角度,推导过程类似:

最终得到的旋转矩阵其实是正向旋转矩阵的逆矩阵,由于这个矩阵是正交阵,所以逆矩阵就是转置矩阵。

上面的向量的坐标都是按照列的形式书写,如果是换成行的形式表示,则旋转的矩阵形式被转置了一下,同时矩阵在行向量的右边进行相乘。

=============2 坐标系旋转============>
2.1平面二维旋转
如下图,xy坐标系中,有一向量OP,其坐标可表示为(x,y),该向量与X轴夹角为α。然后,坐标系绕原点逆时旋转了β角度,形成新的坐标系x’y’,此时OP在新的坐标系中的坐标表示为(x,y),根据几何关系,可以得到如下推导,最终得到绿色虚框的旋转矩阵。
对比上面的旋转矩阵,可以发现:这里坐标系旋转的旋转矩阵与上面向量旋转的旋转矩阵正好是转置的关系(实际上是逆矩阵,因为正交阵的逆矩阵与转置矩阵相同),因为这两种旋转本质上是相对运动,互为逆过程。
2.2 三维旋转
绕X轴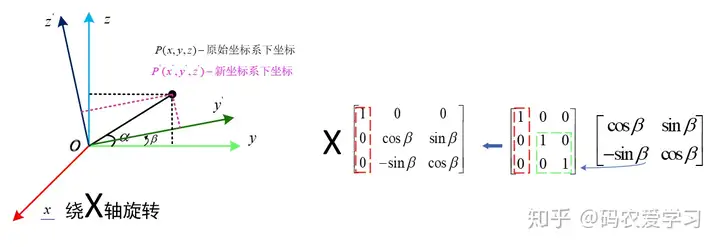



以上就是关于《3维旋转矩阵推导与助记-三维的旋转矩阵》的全部内容,本文网址:https://www.7ca.cn/baike/71957.shtml,如对您有帮助可以分享给好友,谢谢。